Implementing Firing in LIF Neurons#
So far we have a neuron model that represents potential over time. However, we haven’t implemented a crucial part of the neuron: firing! So let’s go from a LI neuron to a LIF neuron. From last time, we have:
class FirstOrderLI: # First Order Leaky Integrate
def __init__(self, tau_rc=0.2, v_init=0): # Default values for tau_rc and v_init
self.tau_rc = tau_rc # Set instance variables
self.v = v_init
def step(self, I, t_step): # Advance one time step (input I and time step size t_step)
self.v = self.v * (1 - t_step / self.tau_rc) + I * t_step / self.tau_rc
LIF neurons have two additional parameters:
A threshold potential, \(v_{th}\) where if the neuron’s potential reaches this threshold, it will fire
A refractory period, \(\tau_{ref}\)—after our neuron fires, this specifies how long until it will “accept” input again.
We are going to represent firing as the neuron’s “output”. By default, the output will be 0. If a neuron is firing, its output will be 1/T_step (dividing by T_step ensures that our neuron releases the same amount of energy regardless of how we tune our simulation’s time step length).
We will thus add some additional instance variables to represent neuron parameters:
self.v_thto represent the firing threshold, \(v_{th}\). Default:1self.tau_refto represent the refractory period, \(\tau_{ref}\). Default:0.002
We also need to track two more instance variables:
self.outputto represent the output (0if not firing,1/T_stepif firing at the current step)self.refractory_timeto represent how much time we have left until our neuron can accept input.
class FirstOrderLIF:
def __init__(self, tau_rc=0.2, tau_ref=0.002, v_init=0, v_th=1): # ADDED: tau_ref and v_th
self.tau_rc = tau_rc
self.v = v_init
# vvv ADDED vvv
self.v_th = v_th
self.tau_ref = tau_ref
self.output = 0
self.refractory_time = 0
# ^^^ ADDED ^^^
def step(self, I, t_step):
self.v = self.v * (1 - t_step / self.tau_rc) + I * t_step / self.tau_rc
Then, we need to modify the step(I, t_step) function to add firing. First, after the voltage is updated, we need to check if it is greater than the threshold. If it is, we fire (set self.output to 1/t_step) and reset the voltage (set self.v to 0):
if self.v >= self.v_th: # Voltage is above the threshold
self.output = 1 / t_step # Fire
self.v = 0 # Reset potential
else:
self.output = 0 # Don't fire
But we don’t just want to set self.v to 0. We want it to stay at 0 for \(\tau_{ref}\) (stored in the instance variable self.tau_ref) seconds. We use self.refractory_time to track how much time we have left until the neuron accepts input again. So let’s modify the above code to set the refractory time remaining if the neuron fires:
if self.v >= self.v_th: # Voltage is above the threshold
# vvv ADDED vvv
self.refractory_time = self.tau_ref
# ^^^ ADDED ^^^
self.output = 1 / t_step # Fire
self.v = 0 # Reset potential
else:
self.output = 0 # Don't fire
We also want to update self.refractory_time every time we take a step:
def step(self, I, t_step):
self.refractory_time -= t_step # Subtract the amount of time that passed from our refractory time
# ...
But we also need to check if we are in a refractory period before we update the voltage, so we need to wrap our update to self.v inside a conditional:
def step(self, I, t_step):
self.refractory_time -= t_step # Subtract the amount of time that passed from our refractory time
if self.refractory_time < 0: # If we aren't in our refractory period, update the voltage
self.v = self.v * (1 - t_step / self.tau_rc) + I * t_step / self.tau_rc
# ...
Overall, this gives us:
class FirstOrderLIF: # First Order Leaky Integrate and Fire
def __init__(self, tau_rc=0.2, tau_ref=0.002, v_init=0, v_th=1):
self.tau_rc = tau_rc # Potential decay time constant
self.v = v_init # Potential value
self.v_th = v_th # Firing threshold
self.tau_ref = tau_ref # Refractory period time constant
self.output = 0 # Current output value
self.refractory_time = 0 # Current refractory period time (how long until the neuron can fire again)
def step(self, I, t_step): # Advance one time step (input I and time step size t_step)
self.refractory_time -= t_step # Subtract the amount of time that passed from our refractory time
if self.refractory_time < 0: # If the neuron is not in its refractory period
self.v = self.v * (1 - t_step / self.tau_rc) + I * t_step / self.tau_rc # Integrate the input current
if self.v > self.v_th: # If the potential is above the threshold
self.refractory_time = self.tau_ref # Enter the refractory period
self.output = 1 / t_step # Emit a spike
self.v = 0 # Reset the potential
else: # If the potential is below the threshold
self.output = 0 # Do not fire
return self.output
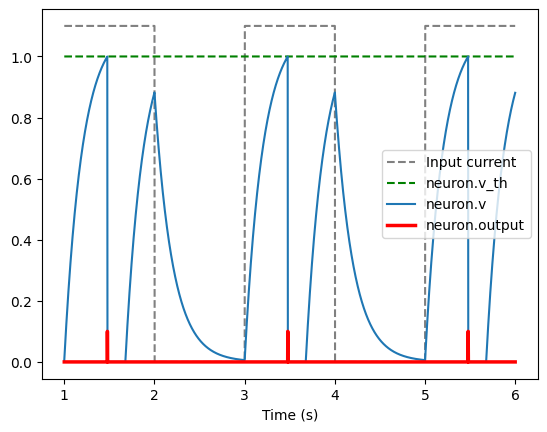
Then, if we plot the output of our neuron, we should see it spike when the voltage reaches the threshold, and then be silent for the refractory period.
Show code cell source
import numpy as np
import matplotlib.pyplot as plt
duration = 6 # Duration of the simulation
T_step = 0.001 # Time step size
times = np.arange(1, duration, T_step) # Create a range of time values
neuron = FirstOrderLIF(tau_ref = 0.2) # Create a new LIF neuron
def square_wave(t): # Our input current function will be a square wave
return 0 if (t % 2) < 1 else 1.1
I_history = []
v_history = []
output_history = []
vth_history = []
for t in times: # Iterate over each time step
I = square_wave(t) # Get the input current at this time
neuron.step(I, T_step) # Advance the neuron one time step
I_history.append(I) # Record the input current
v_history.append(neuron.v) # Record the neuron's potential
output_history.append(neuron.output * T_step / 10) # Record the neuron's output (scaled)
vth_history.append(neuron.v_th) # Record the neuron's threshold
plt.figure() # Create a new figure
plt.plot(times, I_history, color="grey", linestyle="--")
plt.plot(times, vth_history, color="green", linestyle="--")
plt.plot(times, v_history)
plt.plot(times, output_history, color="red", linewidth=2.5)
plt.xlabel('Time (s)') # Label the x-axis
plt.legend(['Input current', 'neuron.v_th', 'neuron.v', 'neuron.output']) # Add a legend
plt.show() # Display the plot
Let’s try this out in the code below. Try modifying the values of v_th, tau_ref, and tau_rc to see how they affect the firing behavior.
Summary#
We implemented LIF neurons with the following tuneable parameters:
\(\tau_{rc}\), which specifies how quickly our potential decays
\(v_{init}\), how much potential our neuron starts with
\(\tau_{ref}\), which specifies the refractory period (after our neuron fires, how long until it accepts new inputs)
\(v_{th}\), the threshold potential above which our neuron will fire.
We simulate our neuron’s behavior using a discrete time simulation, where we divide time into time steps of size \(T_{step}\) (which should be small for better accuracy)
The dynamics of our LIF neuron in discrete time are specified by the equations:
\(v[0] = v_{init}\)
\(v[t] = v[t-1] (1 - \frac{T_{step}}{\tau_{rc}}) + \frac{T_{step}}{\tau_{rc}}I[t]\)
In our implementation, the
step()method simulates a single time step for our LIF neuron
References#
The snnTorch overview of LIFs is a very clear and helpful walkthrough through the logic of LIF neurons